移動ロボット、移動ロボット制御システム、制御図形の表示されたシート、及びプログラム
設置の簡便な自己位置推定システム
ロボットのワールド座標系内における位置情報や行動制御情報を外部のデータベースや追加の位置推定の仕組みを用いることなく、完全に独立して行える自己完結性を有する。 情報を格納する実態が二次元コードであるため、本質的に低コストな実装が可能である。
ランドマークコードは任意に追加・削除が可能な上、その情報をロボット与える必要もなく即時利用可能になる。
| 文献番号 | 特許第6259233号 |
|---|---|
| 資料請求番号 | 16010002 |
| 用途 | 移動ロボット(例えば家庭用ロボット掃除機など)に対して、作業空間を仮想的に与えたり、特定の動作を行わせたりすることが可能になる。 |
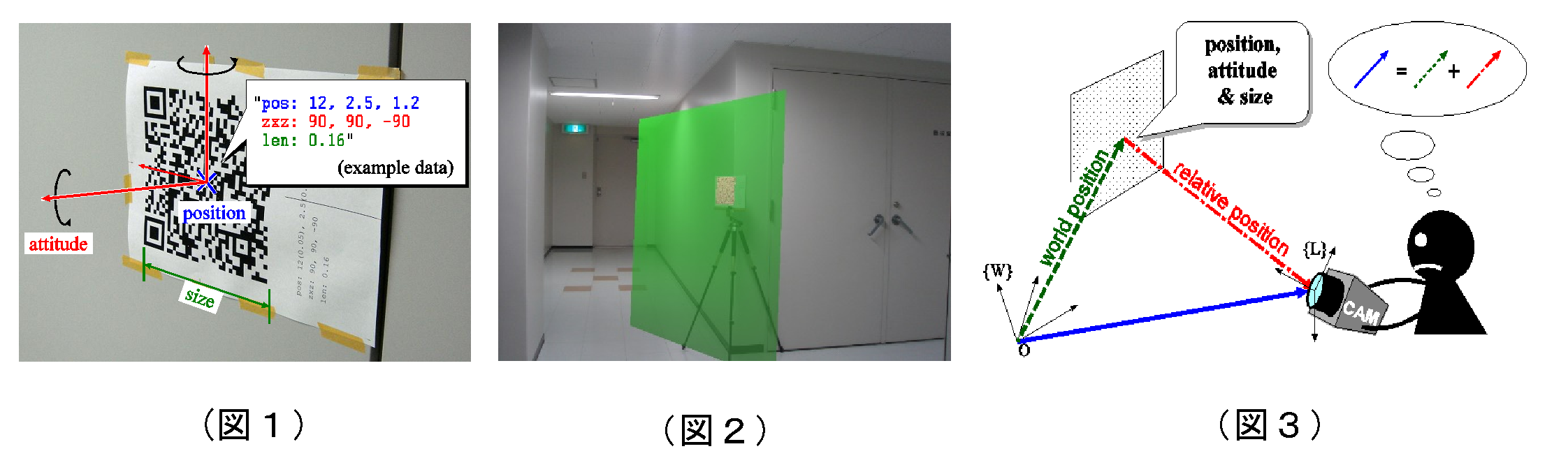
| 技術内容 | カメラを搭載した移動ロボットが、作業空間内に一つないし複数貼付された二次元コード(等)によって実現された「ランドマークコード」の画像を取得する(図1)。その際、ロボットは必ずしも画像を正面からとらえるわけではないため、その画像の歪みから、ロボットとランドマークコードの相対的な位置・姿勢情報を求めることができる。 一方、ランドマークコードにはそのランドマークコード自体のワールド座標系上における位置・姿勢情報および仮想壁のようなロボットの行動制御情報がエンコードされており、ロボットはこれを読み取ることができる(図2)。 こうして得られた二つの情報を組み合わせることで、そのロボットは自己の位置・姿勢および行動制御情報をワールド座標系上で獲得することができる(図3)。 |
| 権利者 | 学校法人 常翔学園 |
| 権利者関連リンク | 1. 双ロール式縦型鋳造装置及び複合材料シート製造方法 2. 金属板製造装置及び金属板製造方法 3. 合金板製造装置及び合金板製造方法 4. 過共晶アルミニウム-シリコン合金圧延板成形品およびその製造方法 抗デングウイルス剤 過共晶アルミニウム─シリコン合金ダイカスト部材およびその製造方法 有孔鋳造品及びその製造方法 割竹の接合部構造及び同接合部構造を利用した枠体の補強構造並びにこれを利用した構造体 自己注入位相同期回路 金属板製造装置及び金属板の製造方法 生体画像処理装置、出力画像製造方法、学習結果製造方法、及びプログラム 対話支援装置及び対話装置 網膜神経保護作用を有するアペリン受容体アゴニストを含有する医薬組成物 知覚閾値測定装置、知覚閾値測定方法及び知覚閾値測定プログラム 光化学系Ⅱを利用した光バイオ燃料電池およびその利用物 相互注入位相同期回路 位置推定装置、照明装置特定装置、学習器、及びプログラム Al-Mg-Si系アルミニウム合金鋳造板およびその製造方法 クラッド材製造方法、クラッド材製造装置、およびクラッド材 足関節の運動支援装置 打音処理方法、及び打音処理装置 熱硬化性組成物および硬化物の製造方法 |

(敬称略)