①自由運動フライトシミュレータ装置
②自由運動シミュレータ装置
広くて大きな6自由度の可動範囲と可動角度を持つ平面運動形三脚パラレルメカニズム
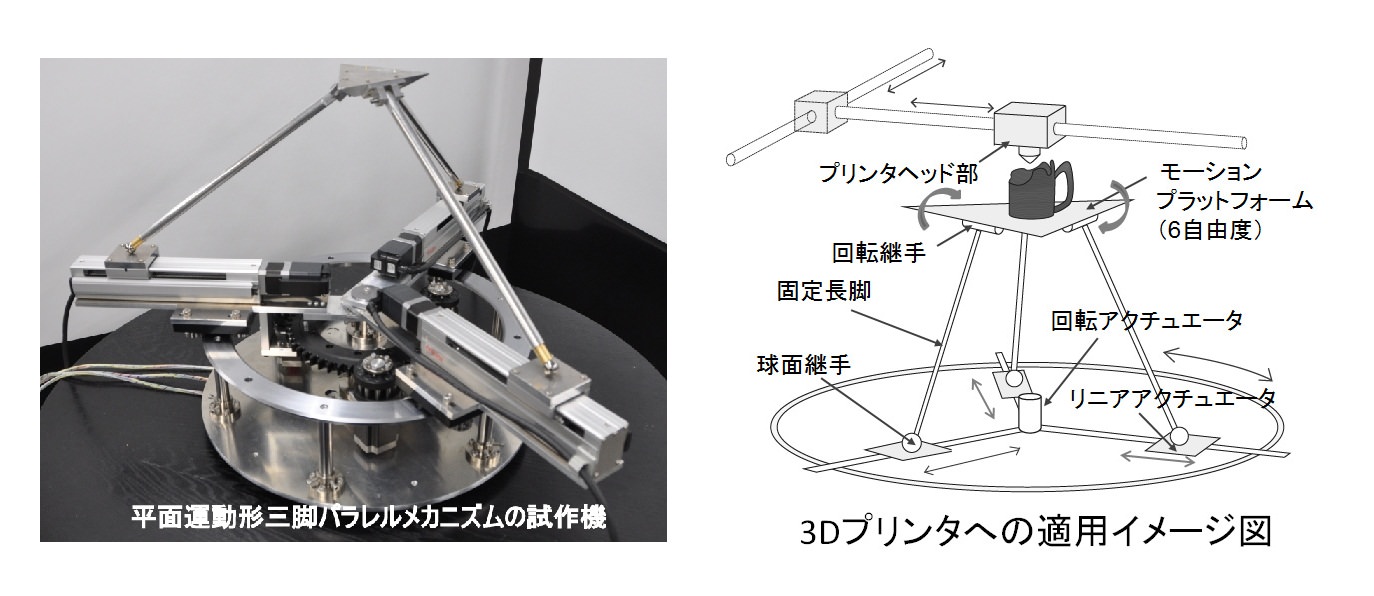
アクチュエータを土台平面内に配置し、3つの固定長の脚で支える構造とすることにより、アクチュエータが脚とモーションプラットフォームのみを支える構造となり、脚やアクチュエータの駆動負荷が大幅に軽減され、広くて大きな可動範囲を持つモーションプラットフォームの高速な運動姿勢制御をコンパクトな構成で実現できる。
| 文献番号 | ①特許第4942046号 ②特許第5477737号 |
|---|---|
| 資料請求番号 | 14110003 |
| 用途 | ・教育訓練用フライトシミュレータや遊戯装置などの運動シミュレータ用モーションプラットフォーム ・3Dプリンタや印刷・塗装・研磨用装置のヘッドやテーブルの可動機構 ・ロボットのマニピュレータ ・工作機械の治具ヘッドや可動テーブル |
| 技術内容 | 本発明は、球面軸受継手と回転軸受継手を持つ3本の固定長の脚で支えられた可動プラットフォームの姿勢が、球面軸受継手側の平面に配置された3対のアクチュエータの独立した2自由度の平面運動により、広い並進運動(位置)と大きな回転運動(角度)の6自由度を持つ運動として実現される新しいパラレル運動機構の技術である。 この三脚で支えられた新しい運動機構は、従来の6脚スチュアートプラットフォーム型のパラレル運動機構により実現できる限界の可動範囲や可動角度(±30度程度)に比べ、十分広くて大きな傾斜角度(最大±90度)と全周方向の回転角度(±360度)が実現できる点に特長がある。 |
| 権利者 | 学校法人 法政大学 |


(敬称略)